Excuse II
| Excuse had several basic problems: The H bridge switches did not apply brakes during their "off" cycle reducing the amount of control over rate of turn. In Exert-O'Meter tests, the chassis was too flexible allowing the rear wheels to bounce too much. The 3 pound Sumo class (where Excuse was designed to run) was being changed to 1 Kg. So, Excuse would have to run in the 3 Kg. Sumo class. Excuse was slow accelerating, so it could not use it's speed to full advantage. More powerful motors were available that were very similar to the original motors. Finally, the Optical mouse experiments were a failure, so there was no reason to retain the electronics. | ||||
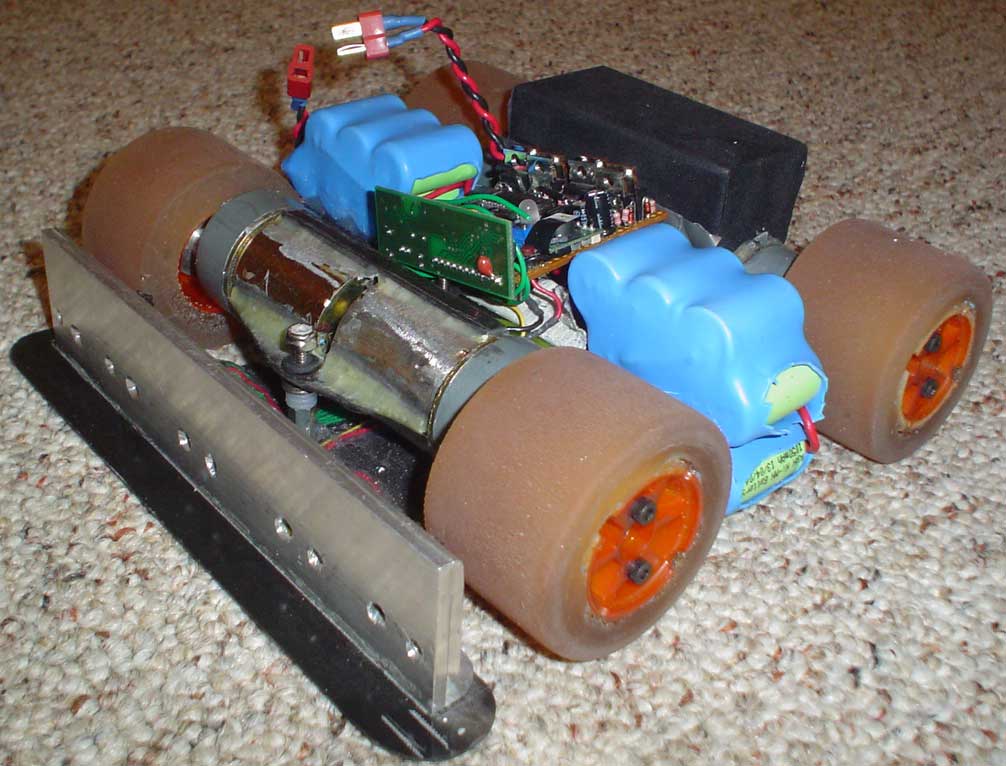
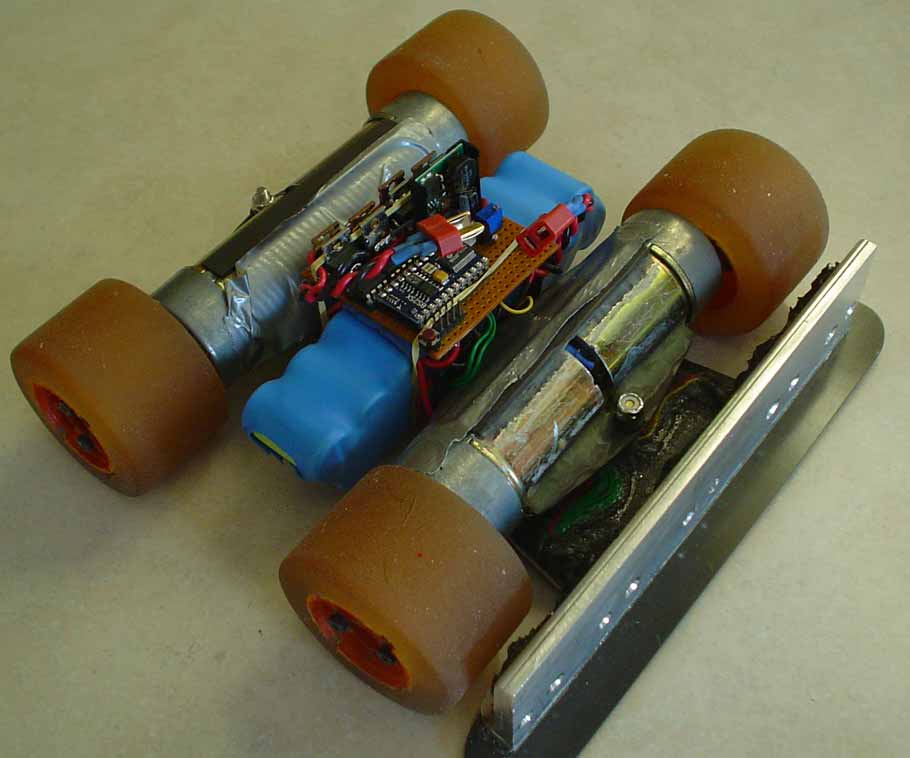 Four ML-30 12 Volt 30:1 motors were ordered from The Robot Marketplace. Excuse was completely disassembled. The original .060" carbon fiber laminate chassis was reinforced with a second piece of .060" carbon fiber laminate. A new fixture was made to hold the motors in align while they were epoxied together. The original optical mouse was removed and it's hole filled in. New mounting points for the motors were drilled and everything was mounted. A set of Kokam 1050 ma-hr batteries was ordered for the larger motors. Four ML-30 12 Volt 30:1 motors were ordered from The Robot Marketplace. Excuse was completely disassembled. The original .060" carbon fiber laminate chassis was reinforced with a second piece of .060" carbon fiber laminate. A new fixture was made to hold the motors in align while they were epoxied together. The original optical mouse was removed and it's hole filled in. New mounting points for the motors were drilled and everything was mounted. A set of Kokam 1050 ma-hr batteries was ordered for the larger motors. |
||||
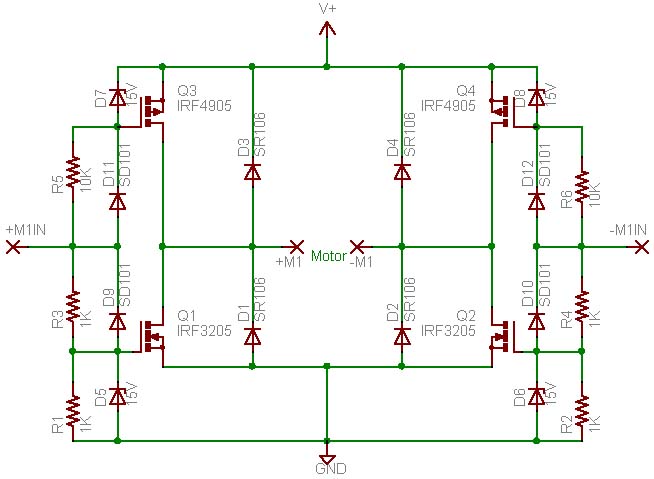
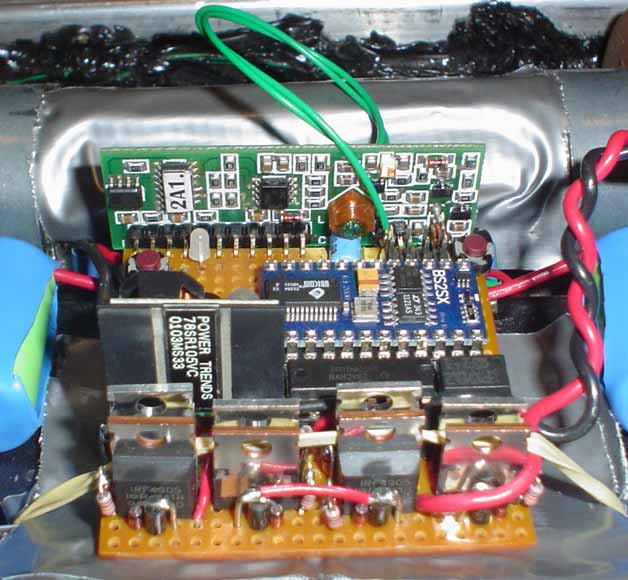
| Once running, the speed of Excuse was less than before at 31.6 inches per second on twelve batteries. Even though the speed was down, acceleration was noticeably improved. The simple solution to increasing speed is to add batteries, but the H bridges were limited to 20 Volts maximum. Any more than twelve batteries would harm the MOSFETs in the bridge.
With the new, higher voltage H bridges and sixteen batteries, Excuse now has a speed of 43.2 inches per second. This is acceptable. Also, from test results, it appears that Excuse reaches full speed in much less than one inch. On the Exert-O'Meter, the 4.1 pound Excuse pushed 15 pounds and was very stable. That is 3.66 times the weight of the robot...a new record. While pushing at 15 pounds, the total current draw from the batteries was just 5 amperes. This compares to 10 amps for a heavier, slower Sticky pushing the same amount. |
||||
In this configuration, Excuse won the Summer, 2004 NEIRG. This was the first event where alternative start routines were used to an advantage. Just turn and push did not work well against either Sticky or Shunji. Instead, backing away or looping around behind produced far better positioning and results. The six inches per second speed increase over the original Excuse made a big difference here. Videos of the Summer, 2004 NEIRG competition:
|
||||
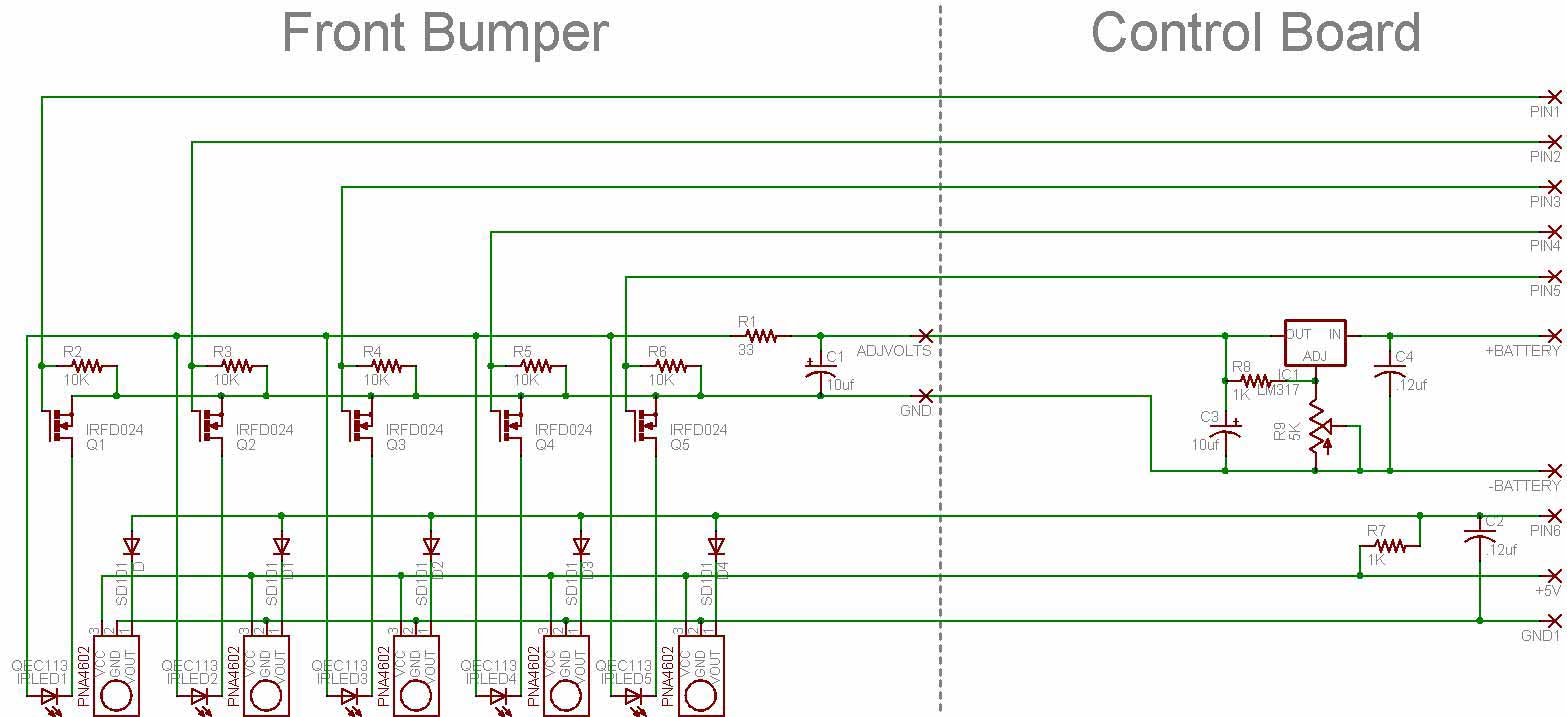
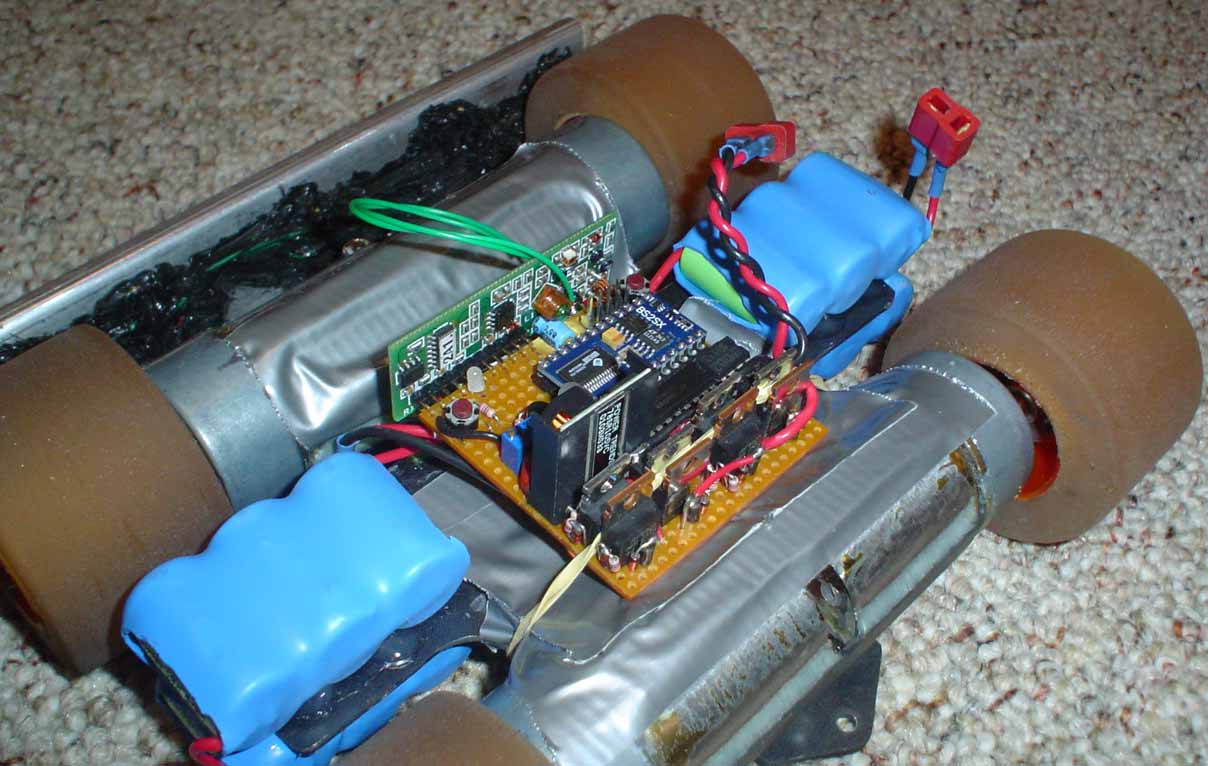
 At the Summer, 2004 NEIRG, it was clear that a "kill" switch would be very handy due to the speed of Excuse. A remote switch identical to Flaming P'nut was added, but electrical noise from the motors made the switch very unreliable. The normal method to control electrical noise is with small capacitors from the motor wires to the motor case. There was not sufficient room to add the capacitors, so the motors were cut apart and the capacitors were added. Since the motors were apart, the rear "suspension" was modified for two reasons. First, more clearance was needed so that the rear of the chassis did not drag on the ground (lifting the rear tires) when Excuse would climb onto an opponent's scoop. Second, in an attempt to control the jumping around of the rear wheels, the mass of the batteries were added directly to the rear motors. Since there was more room, seventeen batteries are glued to the redesigned motor mount. At the Summer, 2004 NEIRG, it was clear that a "kill" switch would be very handy due to the speed of Excuse. A remote switch identical to Flaming P'nut was added, but electrical noise from the motors made the switch very unreliable. The normal method to control electrical noise is with small capacitors from the motor wires to the motor case. There was not sufficient room to add the capacitors, so the motors were cut apart and the capacitors were added. Since the motors were apart, the rear "suspension" was modified for two reasons. First, more clearance was needed so that the rear of the chassis did not drag on the ground (lifting the rear tires) when Excuse would climb onto an opponent's scoop. Second, in an attempt to control the jumping around of the rear wheels, the mass of the batteries were added directly to the rear motors. Since there was more room, seventeen batteries are glued to the redesigned motor mount. |
||||
 The capacitors did not help the kill switch operation. A new transmitter module was available for the kill switch which was advertised as increasing the range to 1 Km. The transmitter module was installed and worked flawlessly. No receiving antenna is needed on Excuse. The seventeen batteries increased the speed to 45.7 inches per second and increased the weight to 4 lbs. 3.8 oz. An Exert-O'Meter test produced 11 lbs. of push and still much jumping around. This was a big disappointment! That is four pounds less push. It is possible that the higher tire speed is affecting push. The motors were run at full speed, then the speed was slowly reduced. Push remained constant down to 70% of full speed, then slowly dropped. At 37% of full speed the push was still 77% of maximum. So it doesn't appear that the higher speed is a detriment to push. The capacitors did not help the kill switch operation. A new transmitter module was available for the kill switch which was advertised as increasing the range to 1 Km. The transmitter module was installed and worked flawlessly. No receiving antenna is needed on Excuse. The seventeen batteries increased the speed to 45.7 inches per second and increased the weight to 4 lbs. 3.8 oz. An Exert-O'Meter test produced 11 lbs. of push and still much jumping around. This was a big disappointment! That is four pounds less push. It is possible that the higher tire speed is affecting push. The motors were run at full speed, then the speed was slowly reduced. Push remained constant down to 70% of full speed, then slowly dropped. At 37% of full speed the push was still 77% of maximum. So it doesn't appear that the higher speed is a detriment to push.
Excuse won the Heavyweight Autonomous Sumo class at the 2004 CIRC Competition. Videos of the Peoria Competition:
|
||||
The twenty three cell battery increased the speed to 53.3 inches per second and increased the weight to 4 lbs. 10 oz. The speed was a little disappointing since I was expecting something over 60 inches per second. There was way too much rear wheel bounce to measure push, so the hunk of lead was added to try to settle down the bouncing. The lead brought the total weight up to 2.9 KG for the heavy weight class. A Final Exert-O'Meter test produced 12 lbs. of push and the extra weight only slowed the frequency of the bounce. Excuse did not win the Heavyweight Autonomous Sumo class at the 2005 NEIRG Competition. After an easy match against Dozer (the eventual second place winner), Excuse went up against the ultimate winner, Titan. Watch the Video: Excuse vs Titan
The motors have been replaced, the battery pack is back to seventeen cells, and the lead weight has been removed. Excuse is now a test mule for future experiments. |